Updated autonomous roll mode with pre-calibration for precise positioning, roller controller, with redesigns to motors for precise positioning and feedback control.
Hall sensor Dual Acuation
Updated casing and shaft design for a hall sensor implementation to allow for precise positioning and sustainability.
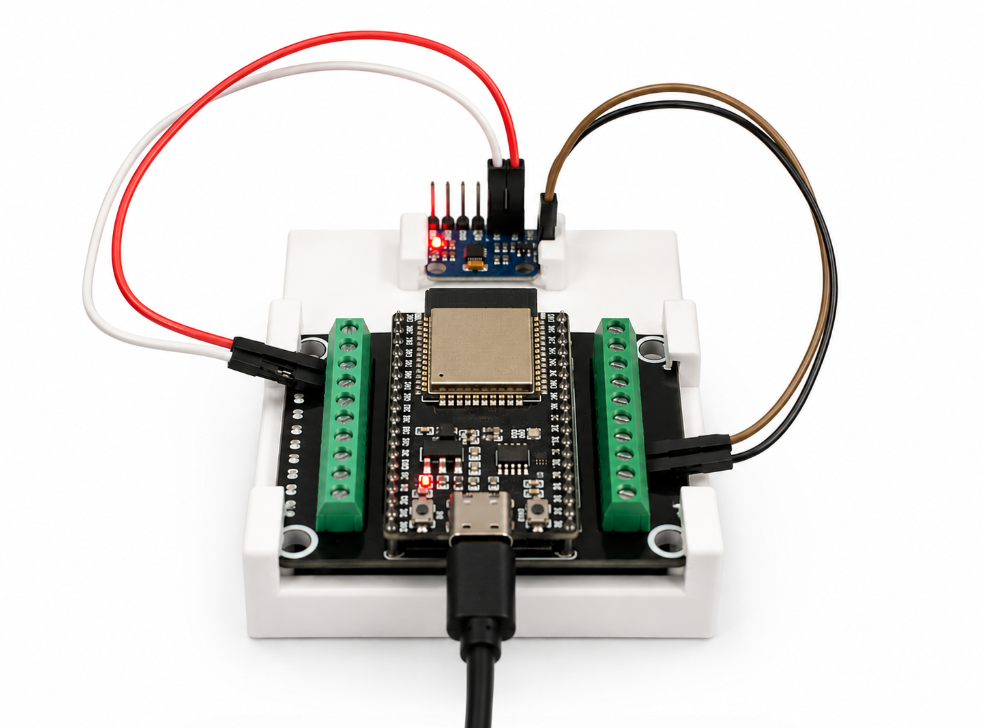
IMU Controller
ESP32 with a custom prototype board implementing a custom case for the board and IMU sensor to allow for precise positioning and communication protocol via ESP-NOW.
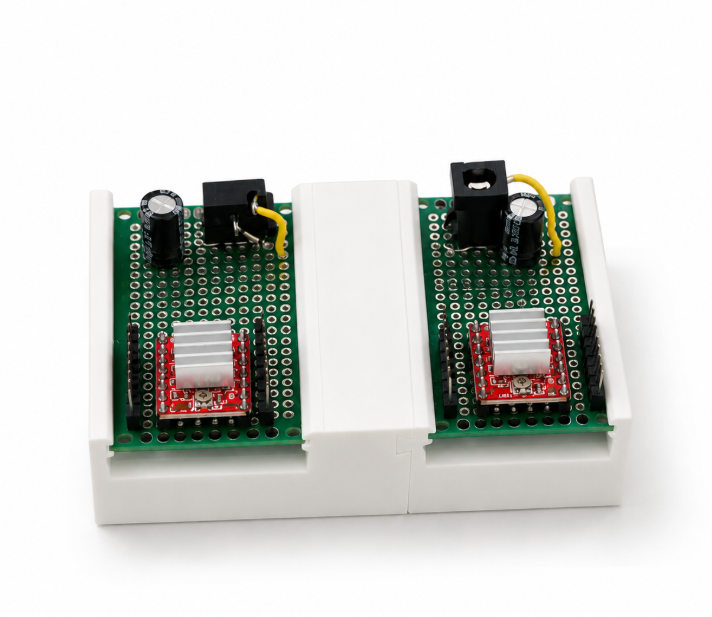
Prototype PCB Case
New Custom casing for motor driver fixtures, allowing for easy accessibility and system integration.